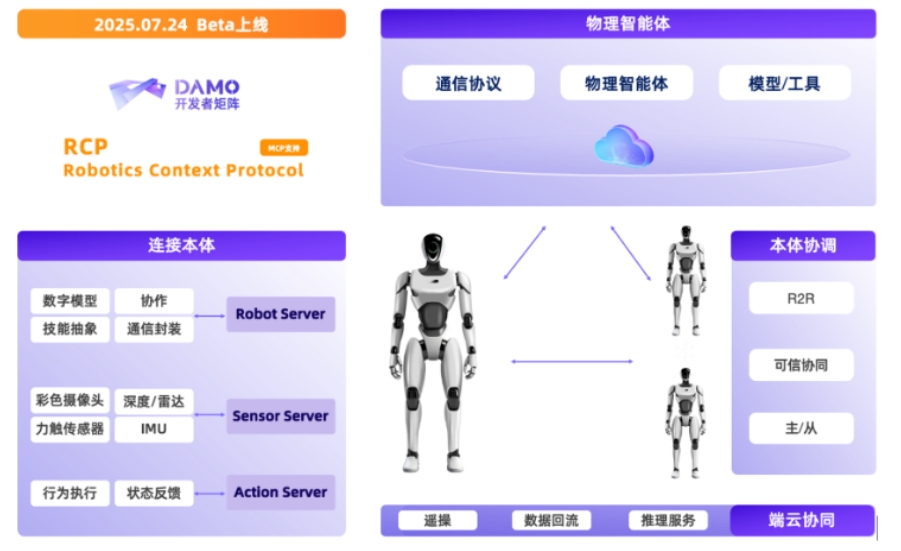
阿里达摩院世界机器人大会开源多项成果,推动具身智能发展 阿里巴巴达摩院在2025年世界机器人大会上宣布开源具身智能“三大件”,其中包括机器人上下文协议RynnRCP、视觉-语言-动作模型RynnVLA-001-7B和世界理解模型RynnEC。这一举措旨在推动具身智能技术的标准化发展,降低开发门槛,加速机器人在工业、家庭等场景的落地应用。1. RynnRCP(机器人上下文协议)RynnRCP是达摩院首次提出的机器人服务框架,借鉴了模型上下文协议(MCP) AI资讯 2025年08月13日 0 点赞 0 评论 1460 浏览